


THREESPIN|ROBOT MOP FOR EVERYBOT


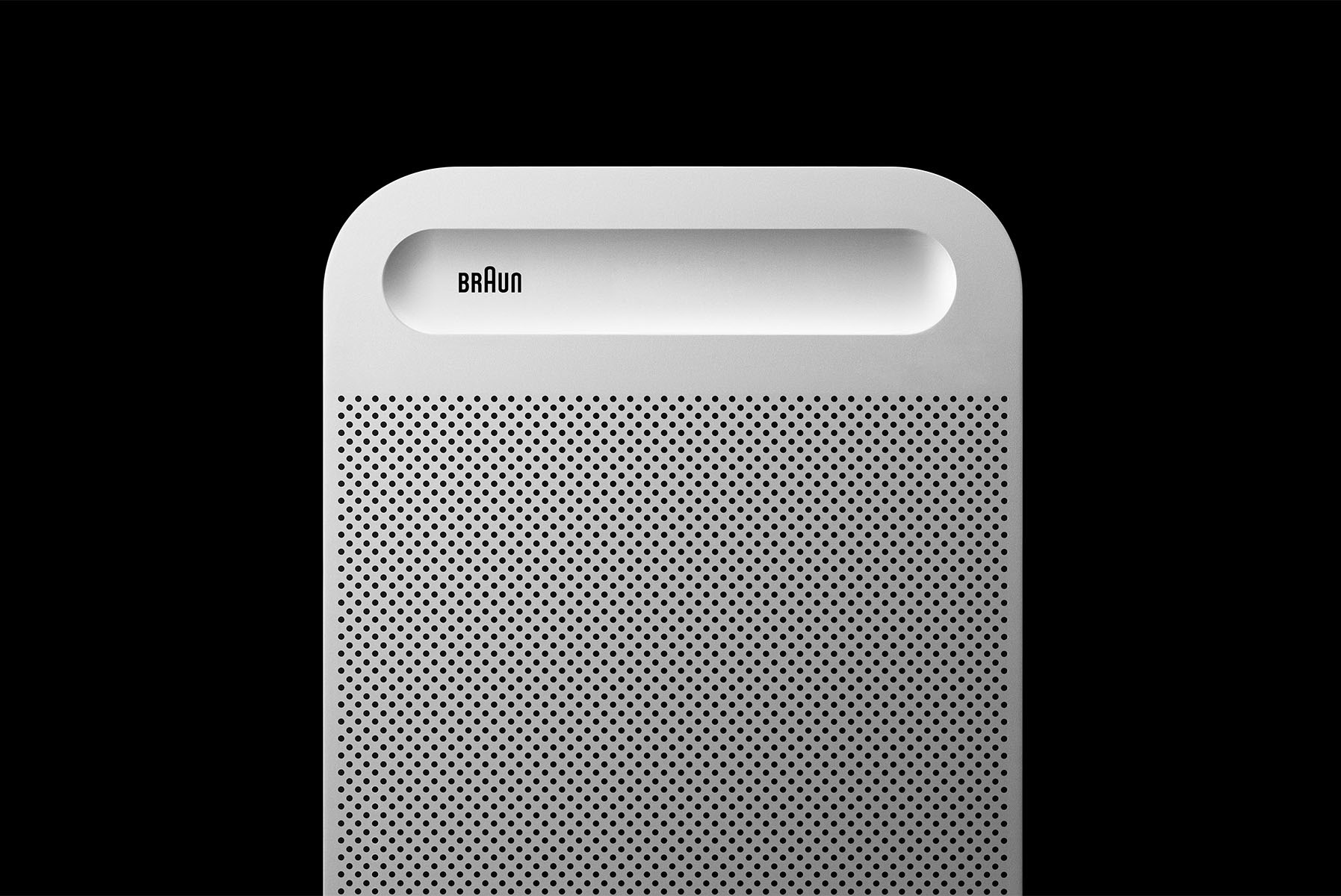
BLOW|AIR PURIFIER FOR CAIRS
Air Purifier Design


JUICEPRESSO X|SLOW JUICER FOR JUICEPRESSO
Slow Squeezing Juicer Design


SMART|WATER PURIFIER FOR COWAY
Water Purifier Design


ICE & WATER|WATER PURIFIER FOR COWAY
Water Purifier with Ice Maker Design


ARC|FAUCET FOR ISLAND KITCHEN
Electric Faucet Design


CONVEX TO CONCAVE|WATER PURIFIER FOR COWAY
Water Purifier Design


HOLE|PORTABLE AIR PURIFIER FOR CAIRS
Portable Air Purifier Design


CUBE|AIR PURIFIER FOR COWAY


ROOT|HUMIDITY CONDITIONER FOR CAIRS
Humidity Conditioner Design

DR-II|SPEAKER
Speaker Design


ICE & WATER MINI|WATER PURIFIER FOR COWAY
Water Purifier with Ice Maker Design


UNIVERSAL PLUG|UNIVERSAL DESIGN FOR ALL USERS
Good Usability for All Users


ROBUST|BLUETOOTH SPEAKER
Speaker Design


EDGE|SMARTPHONE FOR MOTOROLA
Smartphone Design


NB|NAVIGATION + DASHCAM FOR INAVI
GPS Navigation with Dashcam Design
CONFIDENTIAL PROJECT 1
CONFIDENTIAL PROJECT 2
CONFIDENTIAL PROJECT 3
CONFIDENTIAL PROJECT 4

CONFIDENTIAL PROJECT 5
CONFIDENTIAL PROJECT 6
CONFIDENTIAL PROJECT 7
CONFIDENTIAL PROJECT 8

CONFIDENTIAL PROJECT 9